Open
Conversation
Borrowed some functions from other solvers, wrote new updateEnvironment() function
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
1 participant
Add this suggestion to a batch that can be applied as a single commit.This suggestion is invalid because no changes were made to the code.Suggestions cannot be applied while the pull request is closed.Suggestions cannot be applied while viewing a subset of changes.Only one suggestion per line can be applied in a batch.Add this suggestion to a batch that can be applied as a single commit.Applying suggestions on deleted lines is not supported.You must change the existing code in this line in order to create a valid suggestion.Outdated suggestions cannot be applied.This suggestion has been applied or marked resolved.Suggestions cannot be applied from pending reviews.Suggestions cannot be applied on multi-line comments.Suggestions cannot be applied while the pull request is queued to merge.Suggestion cannot be applied right now. Please check back later.
Link to DRRT paper: https://www.clear.rice.edu/comp450/papers/drrt.pdf
DRRT (Dynamic RRT) is a tree-based motion planning algorithm for dynamic environments. In addition to traditional RRT, it implements a replanning procedure which repairs the RRT when changes have been made to the configuration space. In static environments, DRRT behaves identically to RRT, and thus inherits properties such as probabilistic completeness.
Subsequent calls to the solve method of the planner will prune the tree based on changes to the environment, and keep adding nodes until a solution is found again. In some situations, this is faster than planning from scratch.
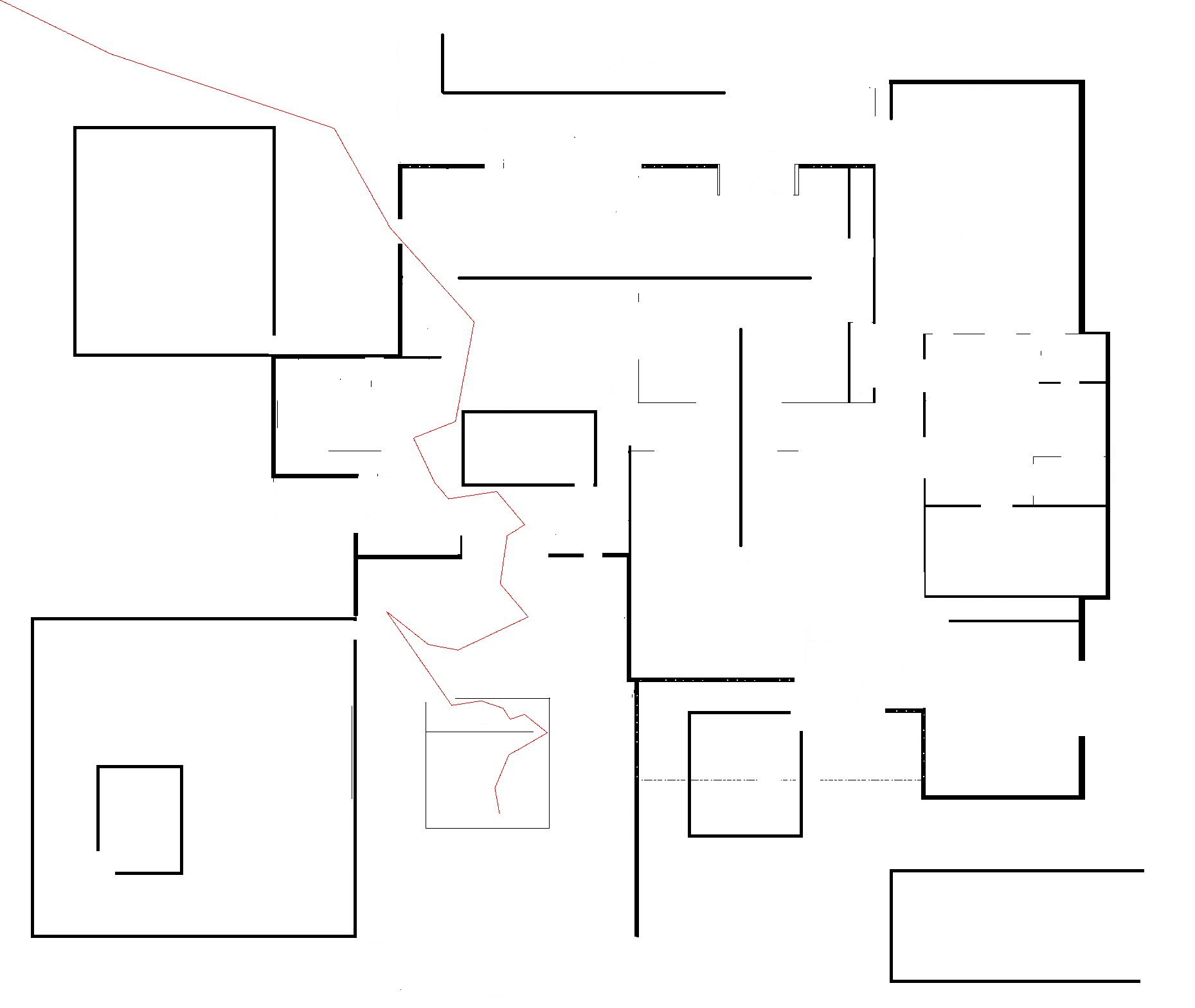
This planner was tested using a modification of the Point2DPlanning demo, where the environment and start positions were changed between calls to solve. It can be observed that parts of the tree are reused.
Initial call to solve:
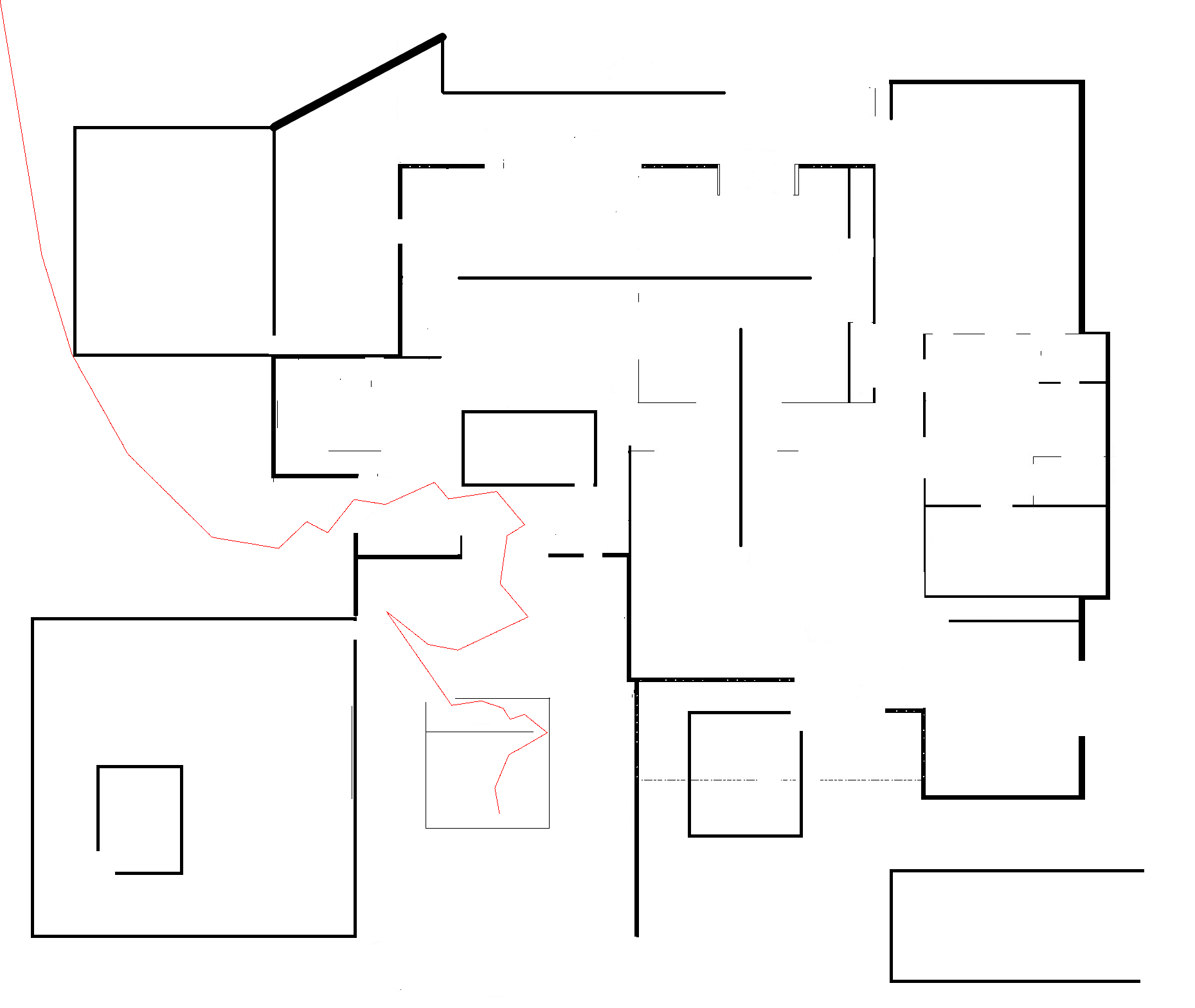
Adding a barrier close to the start, and calling solve again (7x faster than initial solve):
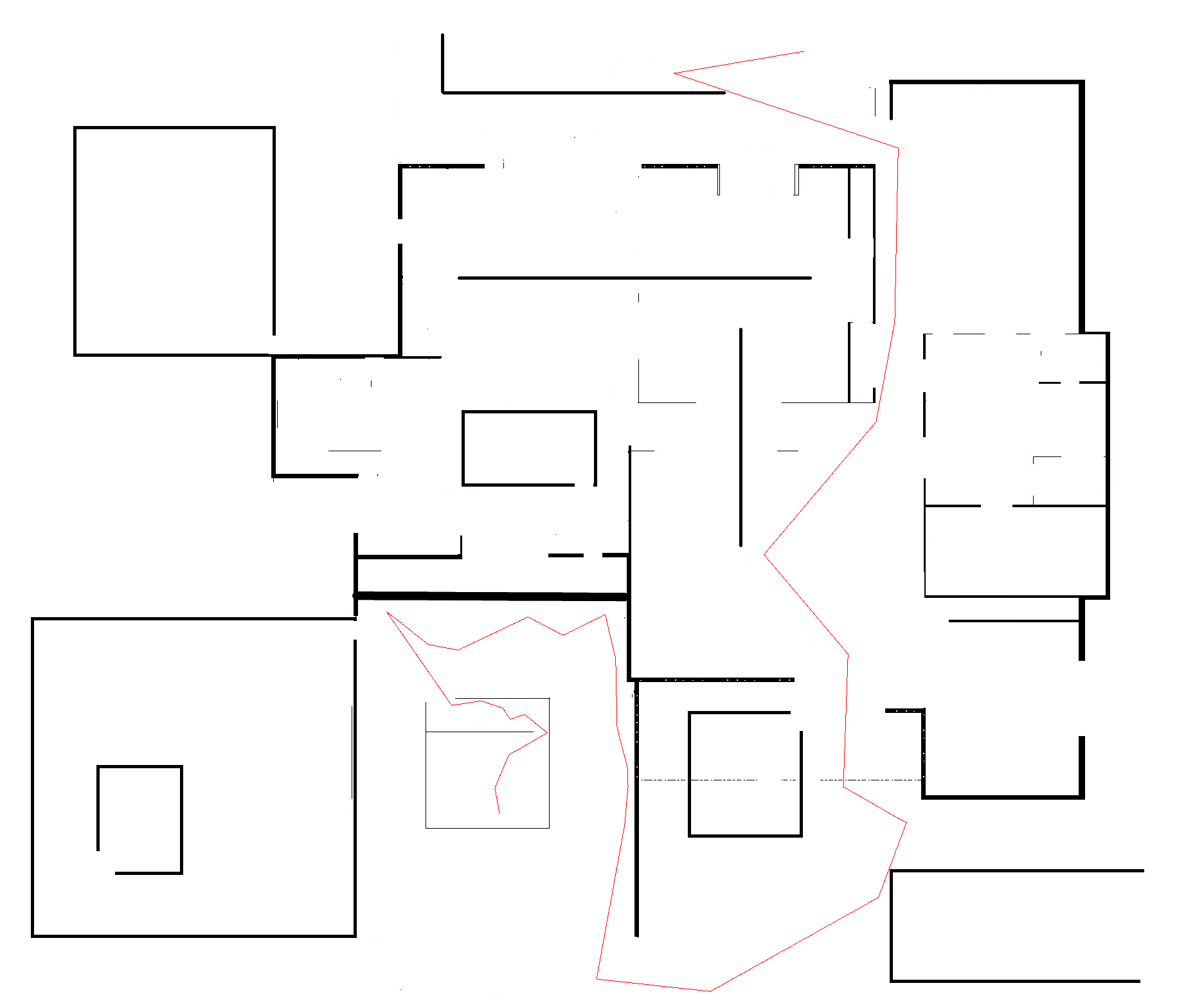
Changing the start position whilst keeping the barrier:

Adding a barrier closer to the goal:
The planner was also tested in Pybullet with a Turtlebot: https://github.com/romand001/pybullet_ompl